PiArm: The DIY Robotic Arm for Raspberry Pi
A project in London, UK by SB Components Ltd000days
:
00hours
:
00minutes
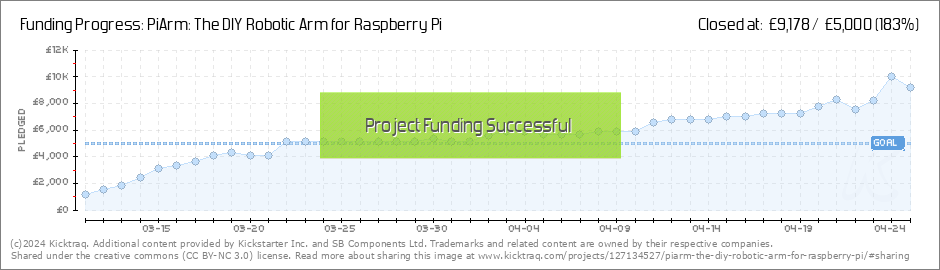
Funding Successful

Introducing PiArm, the Raspberry Pi based DIY robotic Arm.
Backers: 41
Average Pledge Per Backer: £224
Funded: £9,178 of £5,000
Dates: Mar 11th -> Apr 25th (45 days)
Project By: SB Components Ltd
Backers: 41
Average Pledge Per Backer: £224
Funded: £9,178 of £5,000
Dates: Mar 11th -> Apr 25th (45 days)
Project By: SB Components Ltd

£9,178
current pledge level
Last Updated: April 25 @ 13:05 -0400 GMT
183%
of goal
(loading your very own snazzy kicktraq chart)
(loading your very own snazzy kicktraq chart)
(loading your very own snazzy kicktraq chart)
(loading your very own snazzy kicktraq chart)
(loading your very own snazzy kicktraq chart)
Now you can share!
Help your backers reach your daily goals and help others see how you're doing. It's easy, with Kicktraq Mini.Here are a few quick snippits of code you can use to embed your personalized widget on your website, in your blog, and even on your favorite forum.
HTML for websites & blogs
Copy HTMLBBCode for forums
Copy BBCodeReddit code for... well, Reddit
Copy Reddit CodeSpecial Note: Kickstarter recently disabled remote embedding for images on project pages, so embedding code doesn't work on project pages (yet) - just everywhere else.
You can read more about it here.
Latest News
Get. Set. Going! Last 1 hour left..! 
April 25th - via: kickstarter.com
Dear backers, Let's get set ready for the party!!! With just 1 hour left, let's get going with the PiArm, the amazing DIY robotic arm for all your learning and making fun... See you around. :) Regards (Read More)
Huge THANKS......!!!!!
March 30th - via: kickstarter.com
Dear Backers, Greetings of the day..! We are overwhelmed by your love and support for PiArm. Thank you for making it successful..!! We shall strive to deliver you the best of our products and services. Your love is our best compliment. Stay... (Read More)

If you have additional news that doesn't appear here, shoot us a link!